


Доброго всем времени.
Я конструирую удалённо управляемых роботов. Стоит признать получается не совсем идеально, но постепенно они эволюционируют и с каждым разом становятся всё совершенней.
Последный робот был создан под давлением навящевой мысли "нам нужно больше силы". В результате получился неповоротливый железный монстр.
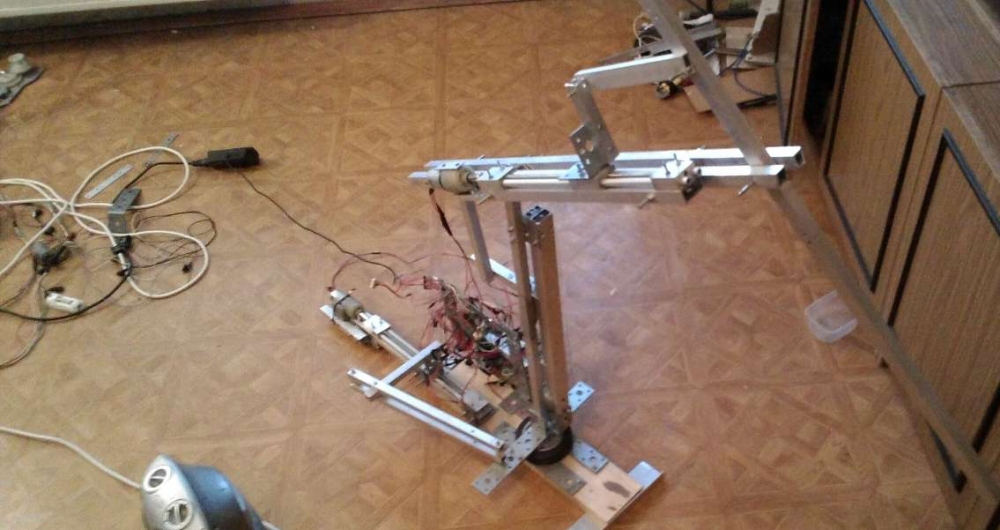
На прикреплённом видео, вы можете наблюдать за его работой. Принцип в общем прост: на страницу сайта транслируется видео с вебкамер и там есть кнопочки. При нажатии на них, приводятся в движение электродвигатели, отвечающие за перемещение определённой части конструкции.
Кстати у этой вундервафли был предшевственник.
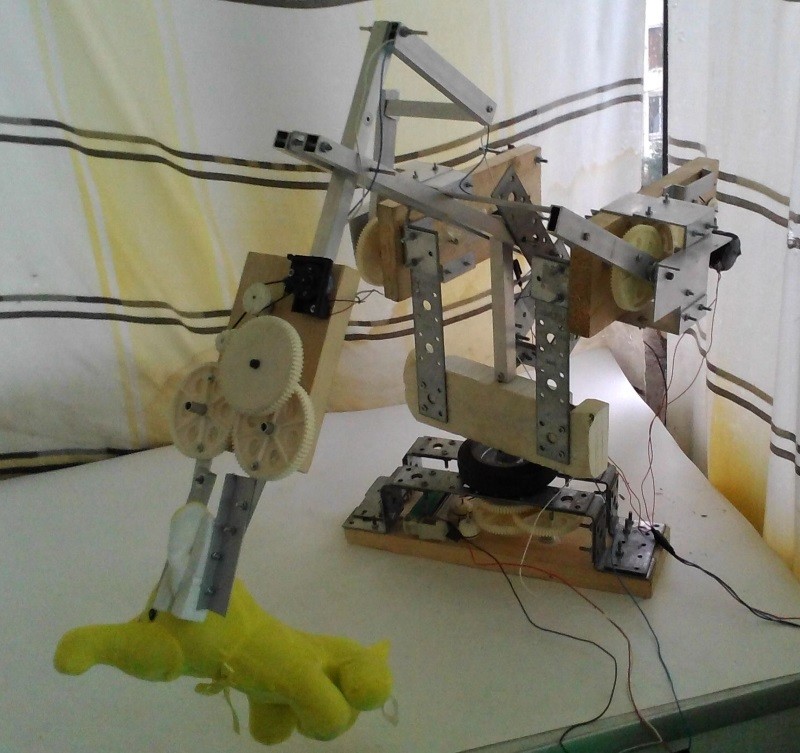
При всей бесполезности поделки, должен сказать было весело. Из одного сообщества ЖЖ народу набежало человек 700. Ты валяешся такой на диване, а они на твоём балконе слона истязают, иногда находясь даже в другой стране.
В общем надо совершенствовать аппараты. Ошибки осознал, и сейчас работаю над их исправлением.
- Блог пользователя - lexgp
- Войдите, чтобы ответить
- 4485 просмотров






Комментарии
Прикольно конечно, но на базе чего создано все? Что за контролеры, приводы и т.д. Хочется подробностей...
Хм.
Как новому человеку подскажите мне, лучше дополнить эту статью или создать новую, а тут ссылку поставить?
Объём материала раза по идее приличный получится.
Если совсем коротко - контроллер банально лпт порт компьютера, который дёргает ногами в сторону Н-мостов. Механика в движение приводится самодельными линейными актуаторами с движками от отвёртки.
Всем этим заведует программа на с#